7-DOF Surgical Manipulator
Redundant 7-DOF kinematic chain with harmonic-drive joints and high-resolution absolute encoders. Optimized for low-force, sub-50 µm repeatability inside a 600 mm spherical workspace.
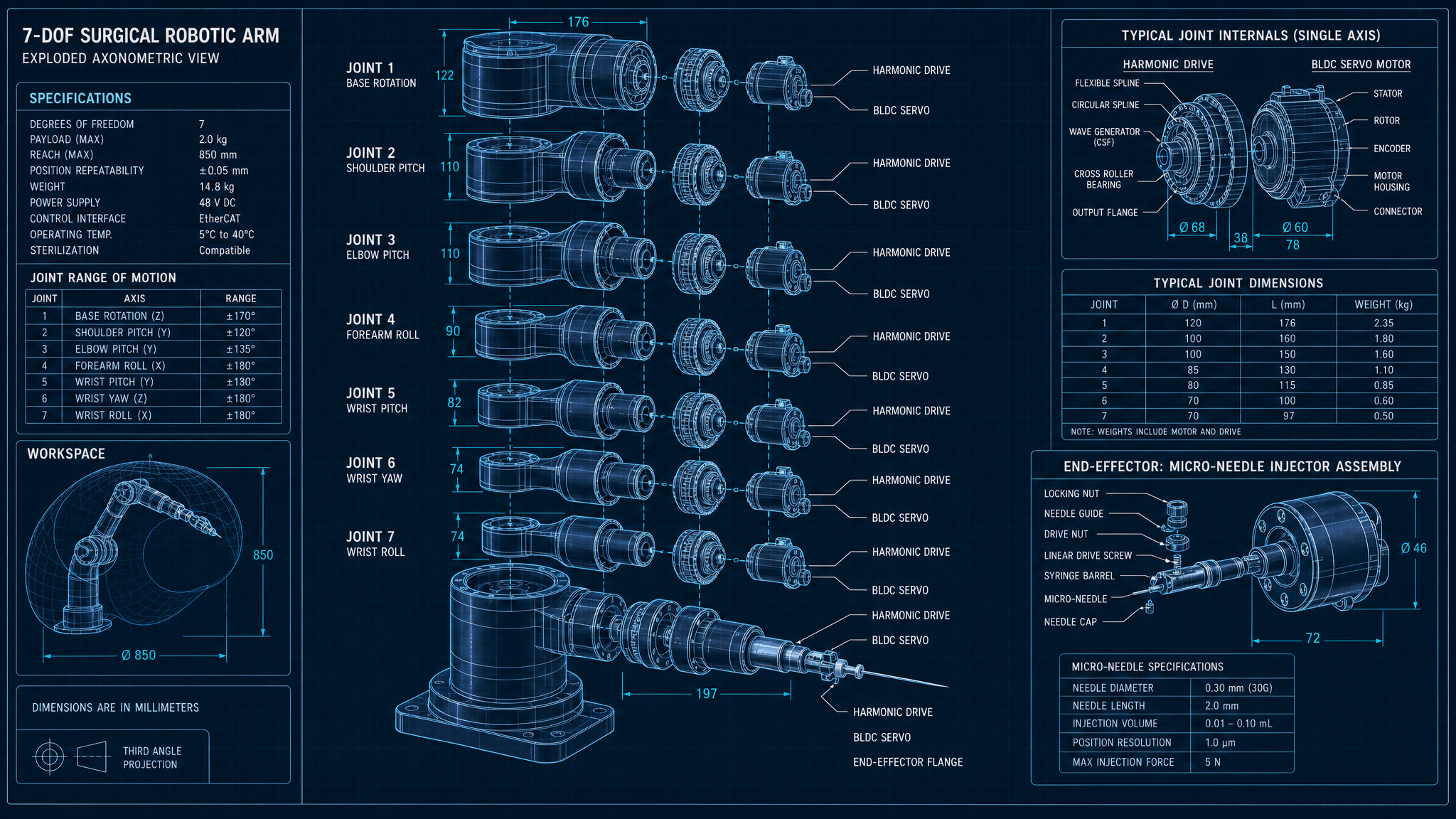
The manipulator implements a kinematically redundant 7R serial topology (S-R-S layout) that maintains dexterity inside the constrained cranial workspace while allowing null-space self-motion for elbow positioning. Joints 1–4 carry the gross-positioning torque budget and use 100:1 harmonic-drive gear sets paired with frameless brushless DC servos. Joints 5–7, located distally, transition to lower-ratio (50:1) units to reduce inertia at the end-effector.
Each joint integrates a dual-encoder strategy — a 23-bit absolute optical encoder on the motor side for commutation and a 21-bit absolute encoder on the output side for closed-loop position. The output encoder is the truth source for the Cartesian controller; the residual difference between encoders is monitored continuously as a transmission-health signal.
Structural members are machined from aerospace-grade 7075-T6 aluminum with surface-passivated, anodized finish (Type II, Class 2). Interfaces in contact with the sterile field are overmolded with autoclave-tolerant PEEK shrouds (Tg ≈ 143 °C) that allow STERRAD VHP cycles.
| Parameter | Value | Unit | Tolerance / Note |
|---|---|---|---|
| Degrees of freedom | 7 | Redundant S-R-S | |
| Cartesian repeatability | ±50 | µm | ISO 9283-3 |
| Joint pos. resolution | 21 | bit abs. | Output side |
| Motor encoder | 23 | bit abs. | Motor side |
| Max joint velocity | 120 | °/s | Joints 1–4 |
| Max TCP velocity | 500 | mm/s | Software-limited to 80 mm/s in procedure mode |
| Payload at TCP | 3.0 | kg | |
| Workspace radius | 600 | mm | Spherical |
| Harmonic drive ratio | 100:1 / 50:1 | J1–4 / J5–7 | |
| Servo type | Frameless BLDC | Slot-less for low cogging | |
| Control loop rate | 4 | kHz | EtherCAT DC-sync |
| Structural alloy | 7075-T6 Al | Hard-anodized Type II Class 2 | |
| IP rating | IP54 | Procedure side |
Null-space projection uses a weighted Jacobian pseudo-inverse with manipulability gradient ∇w(q); singular-value floor enforced at 5e-3 to prevent rank collapse near vertical TCP poses.
Joints 1–3 use forced-convection rear plates with 40 mm low-noise fans; joints 4–7 are passively cooled through anodized aluminum heat-spreaders. Continuous duty derated to 85 % at 40 °C ambient.