8K Optical & ToF LiDAR Module
33 MP global-shutter CMOS sensor co-registered with a ToF LiDAR array and polarized LED ring. Generates dense 4K depth maps of the scalp with <200 µm surface accuracy.
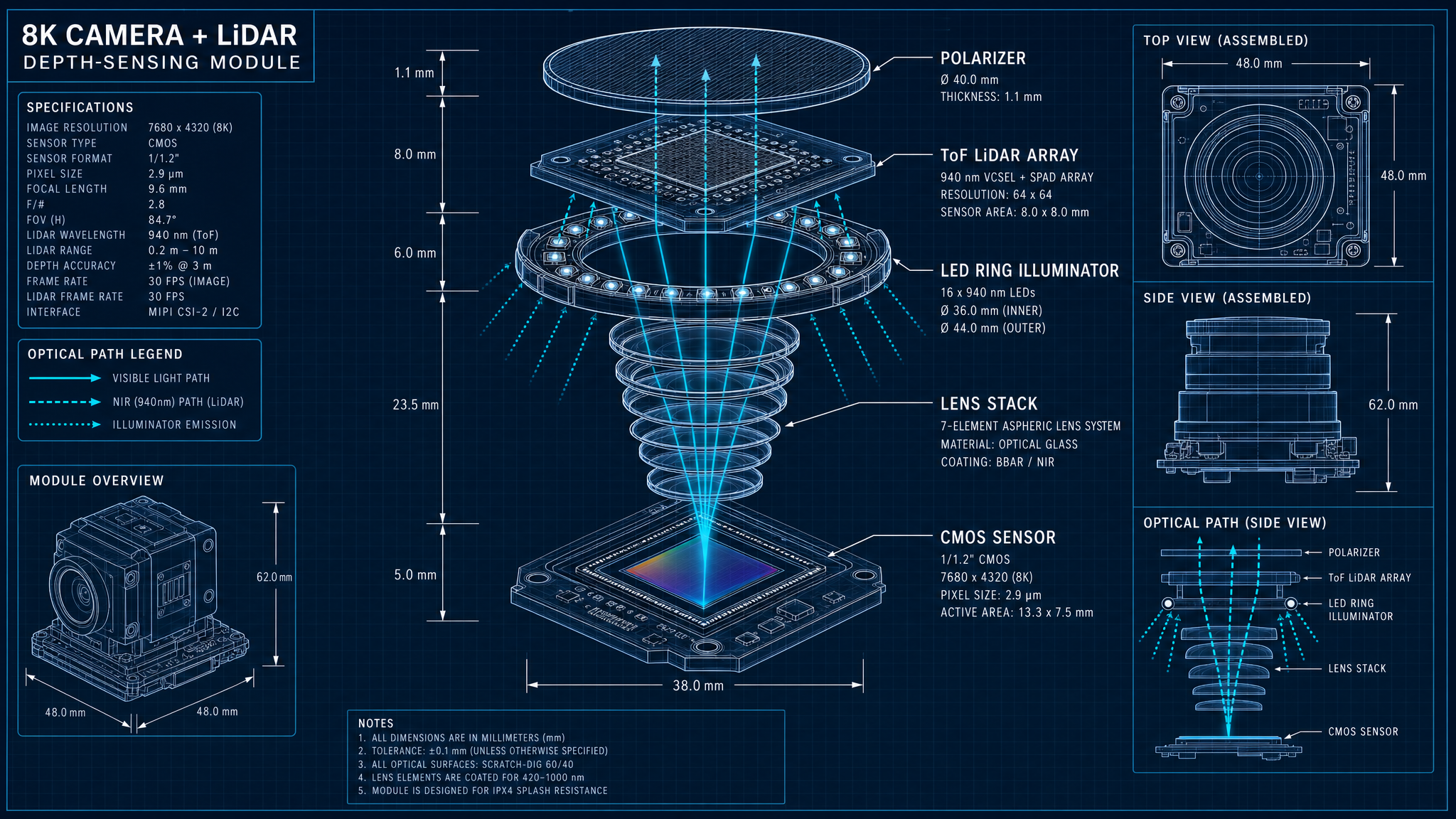
The optical head couples a Sony IMX661-class 33 MP global-shutter monochrome sensor (3.45 µm pixel pitch) with a 5-element F/2.4 fixed-focus lens stack designed for 250 mm nominal working distance. A toroidal LED ring (940 nm + visible bands) provides cross-polarized illumination that suppresses specular skin reflection and improves follicle contrast by 7–9 dB.
A 64×64-element indirect ToF LiDAR array is rigidly co-mounted with the camera and externally calibrated to the camera frame within 30 µm / 0.05° (5×5×5 grid Tsai-Lenz calibration). The fused output is a dense 4K depth map at 30 Hz with surface accuracy held under 200 µm over the working volume.
Calibration is verified pre-procedure via a checkerboard plus 3-sphere artifact; the system rejects calibration if reprojection error exceeds 0.25 px or if any axis depth bias exceeds 150 µm.
| Parameter | Value | Unit | Tolerance / Note |
|---|---|---|---|
| Sensor | IMX661-class CMOS | Global shutter, mono | |
| Resolution | 8192 × 4320 | 33.2 MP | |
| Pixel pitch | 3.45 | µm | |
| Max frame rate | 60 | fps | Full-frame, 10-bit |
| Lens | F/2.4, fixed 250 mm WD | ||
| Illumination | Cross-polarized LED ring | 940 nm + 450/520/630 nm | |
| LiDAR modality | Indirect ToF | 64 × 64 array | |
| Depth map output | 4K @ 30 | Hz | |
| Surface accuracy | <200 | µm | |
| Cross-calibration | 30 µm / 0.05° | Tsai-Lenz | |
| Reprojection limit | 0.25 | px | Cal-reject threshold |