Autonomous Robotic Implantation System
Closed-loop surgical platform combining a 7-DOF manipulator, sub-50 µm force-feedback insertion control, 8K + ToF LiDAR perception, and an ISO 13482-aligned safety stack.
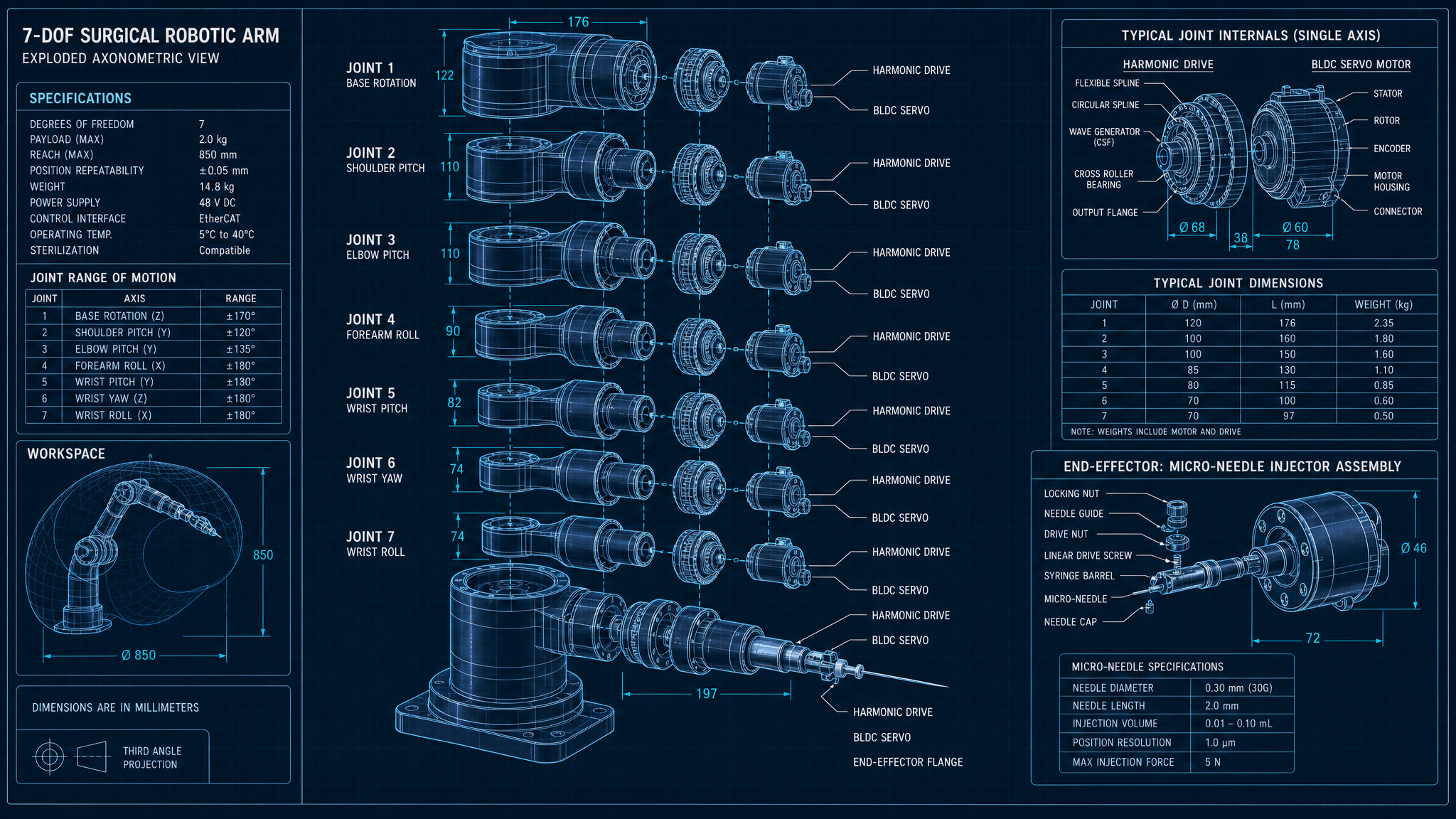
Redundant 7-DOF kinematic chain with harmonic-drive joints and high-resolution absolute encoders. Optimized for low-force, sub-50 µm repeatability inside a 600 mm spherical workspace.
Distal voice-coil micro-actuator with integrated 6-axis F/T sensor provides closed-loop insertion depth control to ±50 µm and skin-tension monitoring at the needle interface.
Ti-6Al-4V halo with viscoelastic polymer pads, fiducial markers, and articulated support frame. Maintains <0.2 mm registration drift for procedure duration.
33 MP global-shutter CMOS sensor co-registered with a ToF LiDAR array and polarized LED ring. Generates dense 4K depth maps of the scalp with <200 µm surface accuracy.
Hybrid YOLOv8-seg + U-Net pipeline classifies follicular units (FU1–FU4), estimates exit angle (±5°), and emits the 3D implantation matrix on the scalp depth surface.
Single-use sterile cartridge with 27G thin-wall implanter needle, plunger-driven follicle release, and pre-loaded 200-cell follicle reservoir.
Triple-redundant sensor architecture, Category 3 PL d functional safety, ISO 13482 / IEC 60601-1 compliance, and watchdog-MCU brownout detection.
Mixed reprocessing strategy: autoclave for mechanical hardware, STERRAD VHP for sensor head, gamma for single-use cartridges. Validated SAL 10⁻⁶.
Tool-less access to joints 4–7, service-replaceable harmonic drive cartridges, MTBF target 20 000 h, and on-board self-diagnostic telemetry.